
Projects

KURA and RoboKUp
Robotics and Soccer as an Applied Autonomy Platform
A robotics platform using soccer-inspired challenges to advance perception, planning, control, and cooperative autonomy.
Read more
Autonomous Greenhouse Farming
Agri Robotics for Greenhouse Farming
Autonomous manipulation, crop monitoring, and visual servoing for agricultural systems in controlled and desert environments.
Read more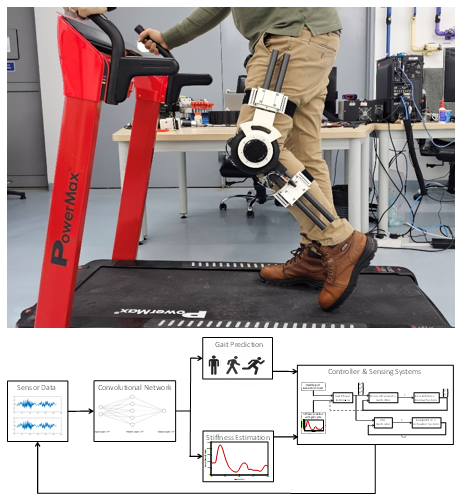
VRI Indoor Farming
AI-driven Robotics for Greenhouse and Indoor Farming
AI-based localization and robot-assisted harvesting for sustainable indoor agriculture.
Read more
Compliant Knee Exoskeleton
Rehabilitation and Assistance for Post-stroke Hemiplegic Patients
Compliant knee exoskeleton with stiffness modulation resembling human knee gait for effective patient assistance.
Read more
User-Defined Sixth Finger
Robotic Assistive Device to Support Stroke Patients
Supernumerary robotic limb for stroke patients with user-centric evaluation prioritizing patient experience.
Read more
Compliant Robotic Hands
Embodied Human-like Compliance and Sensing for Soft Manipulation
Robust robotic hands with human hand synergies, neuromorphic tactile sensing, and complex environment grasping.
Read more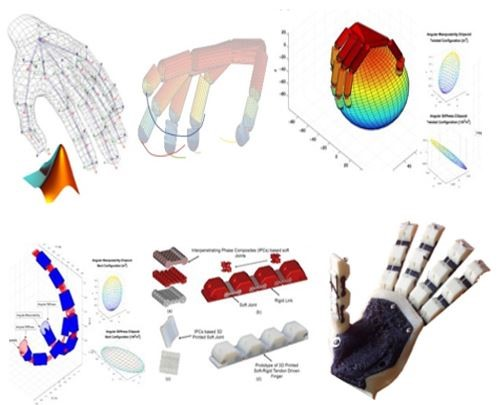
Compliant Manipulation
Safe Human-Robot Collaboration in Industrial Tasks
Compliant robotic manipulation with switchable compliant and rigid modes for safe human-robot co-working.
Read more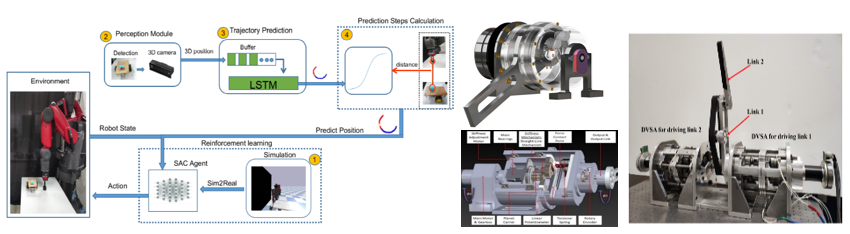

Houbara Wildlife AI
Artificial Intelligence for Understanding Houbara Wildlife in UAE
AI-enabled models to analyze sensory data for bird pose, behavior, vegetation cover, and trap picture analysis.
Read more