Research Focus
We study safe autonomy under realistic uncertainty and deployment constraints, combining formal methods and real-world validation for safety-critical systems.
- Decision-making: Formal analysis of autonomous decision pipelines, including failure modes, safety guarantees, and verification under uncertainty.
- Multi-agent coordination: Coordination and information sharing under uncertainty, including communication constraints and trust assumptions.
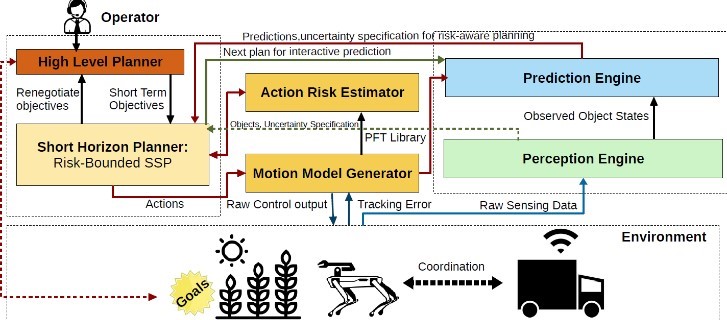
- Risk-bounded planning: Planning and control methods that explicitly encode risk, enabling safety guarantees rather than empirical tuning.
Explore publications, software, datasets, and platforms on the dedicated lab site: avlab.io.
Software & DevOps
The lab develops three core autonomy stacks for perception, planning, validation, and fleet coordination. Full details are on the DevOps page.

AVLite
High-level autonomy stack for advanced decision-making, perception, and planning — enabling robust navigation and complex task execution. AVLite documentation.

ORBit
Mid-level autonomy stack focused on real-time risk assessment and high-level plan validation through independent evaluation and agentic verification.

Pigeon
Cloud-based backend for coordination, data management, and multi-agent collaboration — supporting remote monitoring and digital twin integration.
Source code and releases are on GitHub. The lab fleet includes passenger shuttles and a retrofitted Nissan Leaf equipped with LiDAR and cameras for last-mile mobility and data collection.
Datasets
Open datasets support autonomous driving research in Gulf urban traffic, high-speed racing, desert off-road navigation, and campus shuttle operation. All datasets are licensed under CC BY-NC-SA 4.0. Browse and download from the datasets page.
Emirates Multi-Task (EMT)
57 minutes of annotated urban traffic footage from the Gulf Region — pedestrians, cyclists, and seven vehicle classes across dense traffic, rain, and night-time reflections.
EagleVision
LiDAR perception benchmark spanning A2RL and Indy Autonomous Challenge data — 28,056 labeled frames for 3D detection and trajectory prediction across three domains.
Off-Road Open Desert Trail Detection (O2DTD)
5,045 RGB images for desert freespace detection across six lighting conditions from dawn through night.
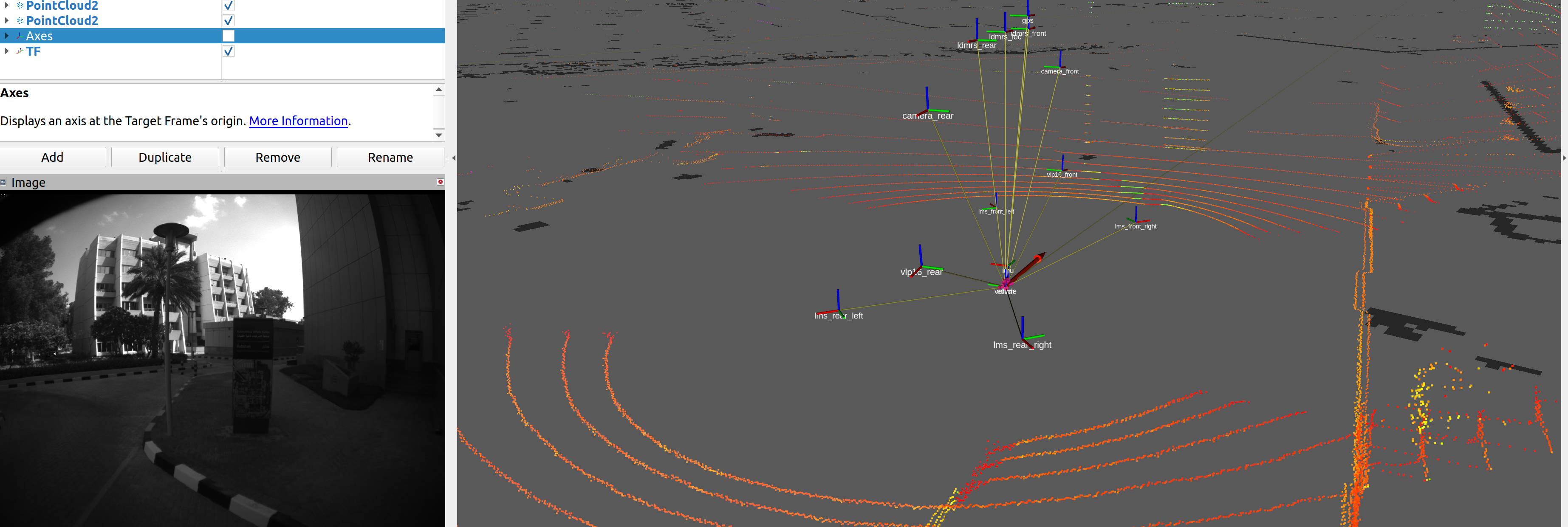
KU Autonomous Shuttle (KUAS)
~20 minutes of unlabeled multi-sensor data from the SAN Campus shuttle — eight LiDARs, monochrome cameras, IMU, and GPS.
Projects

MSAP
Multi-robot Symbiotic Autonomy Platform for Next-generation Cities and Smart Communities
A proof-of-concept multi-robot platform for risk-aware navigation, autonomous package delivery, preference-aware mobility, integrated perception, smart patrolling, and an API for future campus applications.
Read more