Hierarchical reasoning, uncertainty-aware planning, compliant manipulation, and legged robot integration for logistics and agriculture applications.
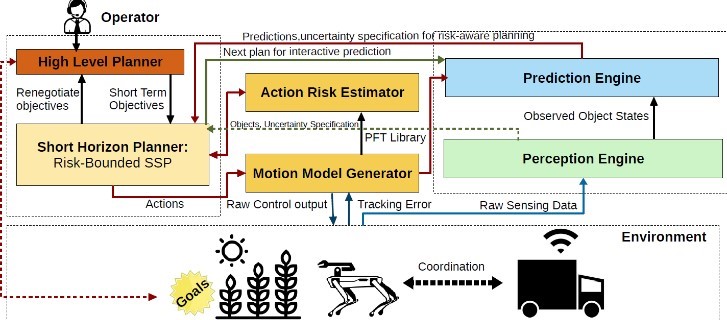
The successful integration of autonomous systems in real-world environments, such as last-mile logistics and agriculture, requires effectively handling uncertainties and risks. This research emphasizes hierarchical reasoning, uncertainty-aware planning, and compliant manipulation in autonomous legged robots integrated with autonomous vehicle platforms.
Legged robots overcome limitations of wheeled platforms on rough terrain and in delicate agricultural environments. A key aspect is leveraging prediction and perception subsystems that explicitly represent uncertainty, enabling the reasoning module to make well-informed decisions.
Objectives
- Develop a hierarchical reasoning framework for integrated autonomy in autonomous legged robots and vehicle platforms
- Investigate techniques for distilling uncertainty from sensing, prediction, and perception modalities
- Design an uncertainty-aware reasoning mechanism that respects risk thresholds and quality of service constraints
- Explore benefits of integrating legged robots with autonomous vehicles for charging, logistics depot, and agricultural storage
- Develop dynamic manipulation strategies for compliant, time- and energy-efficient object handling
Figures